🎯 はじめに:この記事のスコープ
本記事はシリーズ 「脱Microsoft・OSS移行」の第 2 回 です。前回の総論で示した 6 フェーズロードマップのうち、Phase 0(ハードウェア準備)と Phase 4(Ubuntu インストール) にあたる デュアルブート PC の物理構築〜OS インストール〜起動切替 までを実機ベースで解説します。
| 範囲 | 含む | 含まない |
|---|---|---|
| 本記事 | M.2 SSD 増設 / BIOS 設定 / Ubuntu インストール / KDE Plasma 選定 / GRUB 運用 | NVIDIA ドライバ事後導入 / サスペンド対策 / 開発ツール導入 |
| 第 3 回 | — | Ubuntu PC セットアップ(NVIDIA・サスペンド・Bluetooth・ターミナル選定) |
| 第 4 回 | — | Ubuntu 開発環境セットアップ(Docker ネイティブ + Claude Code) |
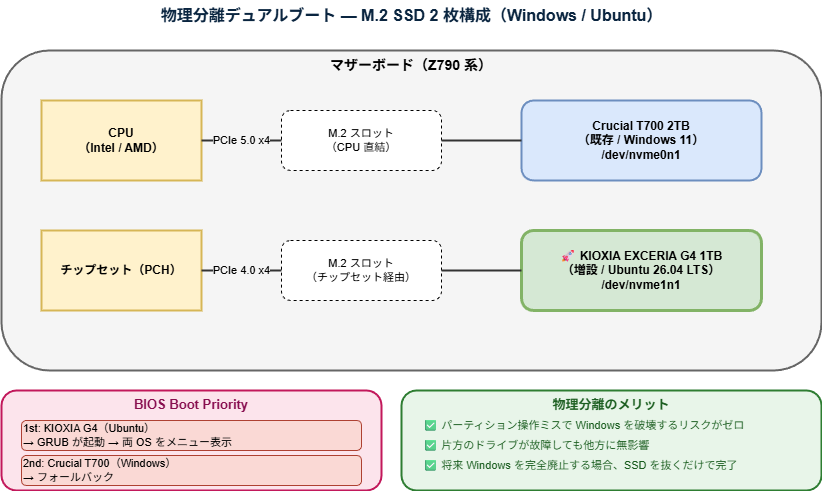
💡 方針: 「いつでも Windows に戻せる安全な構成」を最優先します。M.2 SSD を 2 枚積んで物理的にドライブを分離するため、Ubuntu 側のインストール失敗が Windows 環境に波及しません。
🛡️ 設計判断:なぜ「物理分離デュアルブート」か
「Windows 11 のパーティションを縮小して空き領域に Ubuntu を入れる」のは Linux 入門書の定番ですが、業務 PC では避けるのが無難です。理由は次のとおり。
| 構成 | 初期コスト | 失敗時の影響 | Windows 完全廃止時の手間 |
|---|---|---|---|
| 同一 SSD のパーティション分割 | ¥0 | パーティション操作のミスで Windows 領域も破損しうる | パーティション再構成が必要 |
| M.2 SSD 2 枚で物理分離(採用) | M.2 SSD 1 枚分(約 ¥10,000〜13,000) | 片方が壊れても他方に無影響 | SSD を抜くだけで完了 |
💡 「失敗してもこの SSD を抜けば元通り」という確信が、移行プロジェクトの推進力をそのまま支えます。物理分離は技術的にも心理的にも正しい一手。
マザーボード側の前提
- M.2 スロットが最低 2 つ空いていること(Z790 以降のミドル〜ハイエンドなら多くが該当)
- BIOS で UEFI ブートが有効化できること(Windows 11 が動いているなら基本問題なし)
🧱 物理構成:M.2 SSD(NVMe) 2 枚の役割分担
実機での構成例(Z790 系マザーボード):
| ドライブ | 用途 | スロット | インターフェース |
|---|---|---|---|
| Crucial T700 2TB(既存) | Windows 11 | CPU 直結 M.2 | PCIe 5.0 x4 |
| KIOXIA EXCERIA PLUS G4 1TB(増設) | Ubuntu 26.04 LTS | チップセット経由 M.2 | PCIe 4.0 x4 |
CPU 直結スロットを 既存 Windows に残し、増設する Ubuntu 用 SSD はチップセット経由スロットに刺します。Ubuntu はストレージ I/O のボトルネックがほぼ Docker / コンテナ層になるため、PCIe 4.0 で実用十分。Windows の PCIe 5.0 スロットを犠牲にする必要はありません。
増設手順(5 ステップ)
- PC をシャットダウン → 電源ケーブルを抜く(待機電流防止)
- ケースを開け、空き M.2 スロットを確認(ヒートシンク下に隠れているケースが多い)
- ヒートシンクを外し、M.2 SSD を斜めに差し込んでネジで固定
- ヒートシンクのサーマルパッド保護シールを剥がして元に戻す
- BIOS を起動し、新しいドライブが認識されているか確認
⚠️ サーマルパッドの保護シール剥がし忘れは実機でハマる定番ポイント。剥がさずに使うと熱がこもって SSD のサーマルスロットリングを誘発します。
🐧 Ubuntu 26.04 LTS を選んだ理由
Ubuntu 26.04 LTS(コードネーム: Resolute Raccoon)は 2026 年 4 月 23 日リリースの最新 LTS です。
| 観点 | 26.04 LTS | 評価 |
|---|---|---|
| サポート期間 | 2031 年 4 月まで(5 年 LTS) | ◎ Windows 10 サポート切れより長い |
| Docker Engine 公式サポート | ✅ 公式 apt リポジトリあり | ◎ |
| .NET / Node.js / Python の公式パッケージ | ✅ | ◎ Dev Container ベースイメージと一致 |
| VS Code / Chrome の動作実績 | 主要ディストロのため最も豊富 | ◎ |
| WSL2 で慣れている操作感 | apt / systemd / bash がそのまま | ◎ |
26.04 を採用する最大の理由は 2031 年までサポートされる長期安定 OS という点です。サブスクの逆方向、つまり「5 年触らなくていい」という安心感が、コスト高騰時代にはとても大きい。
💡 ISO ダウンロード元:
https://releases.ubuntu.com/resolute/からubuntu-26.04-desktop-amd64.iso(約 6 GB)を取得します。
🪟 デスクトップ環境:なぜ KDE Plasma か
Ubuntu 標準の GNOME ではなく KDE Plasma(Kubuntu Desktop)を採用しています。
| 環境 | 起動時メモリ | 操作感 | カスタマイズ性 | 推奨度 |
|---|---|---|---|---|
| GNOME(Ubuntu 標準) | 約 1.5 GB | macOS 寄り。重い | 低 | △ |
| KDE Plasma(Kubuntu Desktop) | 約 1 GB | Windows ライク(タスクバー・スタートメニュー) | 高 | ◎ |
| Xfce | 約 500 MB | 超軽量・見た目シンプル | 中 | ○(古い PC 向け) |
KDE Plasma を選ぶ実利は 3 つ。
- Windows ユーザーがそのまま使える操作感 — タスクバー / スタートメニュー / システムトレイの位置が Windows と同じで、移行時の学習コストがほぼゼロ
- メモリを 500 MB 浮かせて Docker に回せる — GNOME 比でこれが効く
- Wayland セッションの安定度が高い — 26.04 では KDE 6 系が標準で、NVIDIA GPU との相性も改善されている
具体的な導入手順は、本記事後半の 「🎨 KDE Plasma の追加インストール(Kubuntu Desktop)」 セクションで解説します。
⚙️ BIOS / UEFI 設定(インストール前)
USB ブートする前に、BIOS で 4 項目を確認・設定します。
| 項目 | 設定値 | 理由 |
|---|---|---|
| Boot Mode | UEFI Only(Legacy / CSM 無効) | Windows 11 の前提。GRUB も UEFI 経路で動く |
| SATA Mode | AHCI | NVMe には影響しないが既定値の確認 |
| Secure Boot | ON のまま | Ubuntu 26.04 は対応済み。OFF は不要 |
| Boot Priority | 1st = 増設 SSD(Ubuntu) / 2nd = 既存 SSD(Windows) | GRUB を経由して両方を選べる状態にする |
📌 Secure Boot は OFF にしないこと。 ネット記事では「Ubuntu 入れるなら Secure Boot OFF」と書いているものが古い情報として残っていますが、Ubuntu 22.04 以降は Shim 経由で Secure Boot に対応しているため、ON のままで問題なくインストール・起動できます。OFF にすると Windows 側の BitLocker 回復キー要求がトリガーされる可能性があります。
⚠️ Bluetooth キーボードは BIOS で動かない。 HHKB Hybrid などの Bluetooth キーボードは OS 起動後でないと使えないため、BIOS 操作は USB 有線キーボードまたはマウスを別途用意してください。GIGABYTE などの BIOS Easy Mode はマウスのドラッグ操作で Boot Priority を変更できるため、有線マウスがあれば代用可能です。
Boot Priority の意味
BIOS Boot Priority
├─ 1st: KIOXIA G4 (Ubuntu) ← GRUB が起動
│ │
│ └─ GRUB メニュー表示
│ ├─ Ubuntu ← デフォルト
│ ├─ Ubuntu (Advanced)
│ └─ Windows Boot Manager
│
└─ 2nd: Crucial T700 (Windows) ← フォールバック増設 SSD を 1st にするのは、GRUB が両 OS をメニューに出してくれるようにするため。Windows 側を 1st にすると、Windows Boot Manager が起動して Ubuntu の存在を意識せず Windows が立ち上がってしまいます。
💿 Ubuntu インストール手順(Phase 4)
実機での手順は 「Windows SSD を物理的に取り外してから Ubuntu をインストール」 の方式を強く推奨します。「Windows 側ドライブを誤指定して Windows を破壊」するリスクが完全にゼロになるためです。
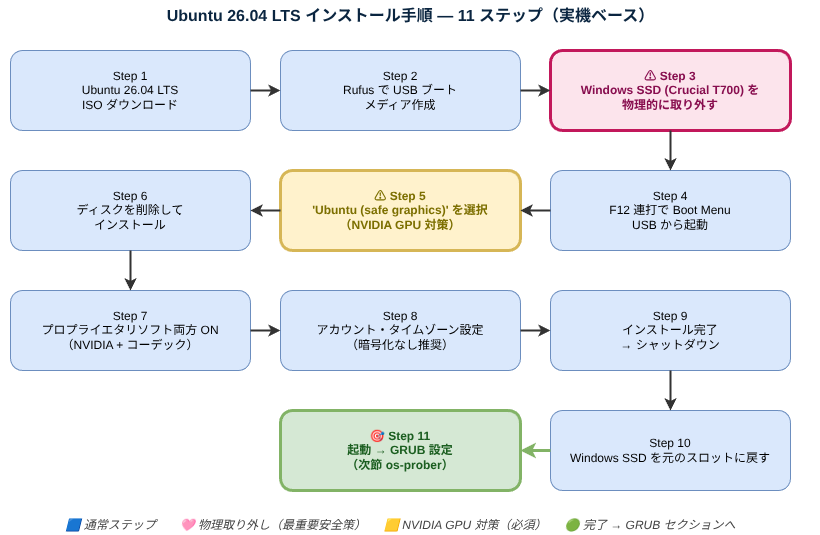
Step 2: USB ブートメディアの作成(Rufus 詳細設定)
Windows 環境で Rufus を使って USB ブートメディアを作成します。Rufus は無料・OSS で、UEFI ブート対応の Ubuntu インストーラを作る最もシンプルな選択肢です(インストール不要のポータブル版が推奨)。
| 設定項目 | 値 | 補足 |
|---|---|---|
| ツール | Rufus v4.x(最新版) | ポータブル版で OK |
| デバイス | USB メモリ(16 GB 以上) | 中身は完全に消える |
| ブートの種類 | ダウンロードした ISO を指定 | ubuntu-26.04-desktop-amd64.iso |
| パーティション構成 | GPT | UEFI 用 |
| ターゲットシステム | UEFI (non CSM) | Legacy BIOS は不要 |
| ファイルシステム | FAT32 | UEFI ブートに必須 |
| 書き込みモード | ISO イメージモードで書き込む(推奨) | DD モードは特殊用途のみ |
⚠️ USB メモリの中身は完全に消えるので、空のメモリを使うか、必要なデータをバックアップしてから実行してください。
💡 Rufus 以外の選択肢:
- balenaEtcher(macOS / Linux / Windows 対応)— クロスプラットフォームで使える GUI ツール
ddコマンド(Linux 環境がある場合の最短ルート)—sudo dd if=ubuntu-26.04-desktop-amd64.iso of=/dev/sdX bs=4M status=progress conv=fsync(/dev/sdXは USB のデバイスパス。間違えるとシステムが壊れるのでlsblkで必ず確認)
Step 3: Windows SSD を物理的に取り外す(最重要・実機推奨)
ケースを開けて Crucial T700(Windows 11)の M.2 ヒートシンクを外し、SSD 自体を抜くだけです。これで インストーラの画面に Ubuntu 用 SSD(KIOXIA EXCERIA PLUS G4)しか見えなくなるため、誤指定の可能性が物理的に消えます。
| 方法 | 安全度 | 手間 |
|---|---|---|
デバイスパスで判別する(/dev/nvme1n1 を指定) | △(人為ミスの余地あり) | 低 |
| Windows SSD を物理的に取り外す(採用) | ◎ ゼロリスク | M.2 ネジ 1 本を外すだけ |
💡 物理取り外しは過剰に見えて、実は 5 分で済みます。「ここで Windows を消したら丸 1 日のリカバリ」というリスクと天秤にかけると、ネジ 1 本の手間ははるかに安い保険です。
Step 4: F12 連打で Boot Menu
電源 ON 直後から F12 キーを連打すると、BIOS に入らずに Boot Menu が直接表示されます(GIGABYTE / ASUS / MSI など多くのマザボで F12)。USB メモリを選択して起動します。
💡 BIOS に入って Boot Priority を変える必要はありません。Boot Menu からの 1 回限り起動で USB から立ち上げるのが最短ルート。
Step 5: 「Ubuntu (safe graphics)」を選択(NVIDIA GPU 対策)
USB から起動すると、以下のような USB ブートメニューが表示されます:
*Try or Install Ubuntu
Ubuntu (safe graphics) ← これを選ぶ
Boot from next volume
UEFI Firmware Settings| 選択肢 | 結果 |
|---|---|
Try or Install Ubuntu(デフォルト) | NVIDIA RTX 系 GPU + nouveau の相性問題でロゴ画面でフリーズ |
Ubuntu (safe graphics) | nomodeset 付きで起動 → 正常にインストーラ起動 |
⚠️ NVIDIA GPU 搭載機ではほぼ確実に発生する罠です。 RTX 30 / 40 / 50 系のいずれでも、Ubuntu インストール時のオープンソースドライバ(nouveau)との相性問題で初回起動がフリーズします。最初から
safe graphicsを選んでください。
Step 6: ディスクを削除してインストール
SSD は 1 枚しか見えていない状態(Windows SSD は物理取り外し済み)なので、迷わず「ディスクを削除してインストール」を選択します。パーティション設計は推奨案を採用:
| パーティション | サイズ | ファイルシステム | マウントポイント | 用途 |
|---|---|---|---|---|
| EFI System Partition | 512 MB | FAT32 | /boot/efi | UEFI ブートローダー |
| root | 残り全部 | ext4 | / | OS + データ |
| swap | 8〜16 GB | swap | — | スワップ |
/home を分けない理由:開発機のデータは Google Drive / Git / Docker volume に分散するため、ローカル /home の容量を気にする運用にしないのがシンプル。分けると 5 年後に必ず「/home は余ってるのに / が足りない」になります。
📌 swap サイズ: 「物理メモリと同じ」と言われますが、ハイバネートしない開発機なら メモリの 1/4 程度(8〜32 GB)で十分。メモリ 64 GB なら 8 GB あれば実用問題なし。
Step 7: プロプライエタリソフトウェア両方 ON
インストーラ画面で「プロプライエタリソフトウェア / メディアコーデック」のチェック項目が出てきたら、両方ともチェックします。
| 項目 | 役割 |
|---|---|
| プロプライエタリなグラフィックスドライバ | NVIDIA 公式ドライバ(safe graphics の後継) |
| プロプライエタリなメディアコーデック | MP4 / H.264 など Web 動画再生に必要 |
これをインストール時にチェックしておくと、再起動後すぐ NVIDIA 公式ドライバが効いた状態で立ち上がります(後から手動で apt install nvidia-driver-XXX する手間が省ける)。
Step 8: アカウント設定の注意
| 項目 | 推奨 |
|---|---|
| ユーザー名 | 短い英小文字(hiro 等) |
| マシン名 | 用途がわかる名前(<project>-dev 等) |
| 暗号化 | 暗号化しない を選択(リモート再起動時にパスフレーズ入力が必要になり、リモートワークと衝突するため) |
| Active Directory | 使用しない(Google Workspace 移行を想定) |
| タイムゾーン | Asia/Tokyo |
Step 10: Windows SSD を元のスロットに戻す
インストール完了後、シャットダウン → 取り外していた Windows SSD を CPU 直結 M.2 スロットに戻す。物理構成は元の 2 枚体制に戻ります。次節で GRUB に Windows を認識させます。
🥾 GRUB ブートローダーの運用
Windows SSD を戻して再起動すると、Ubuntu はそのまま起動しますが、GRUB メニューに Windows が出てこないことに気づきます。Ubuntu インストーラは「インストール時に見えていた SSD だけ」を GRUB に登録するため、後から戻した Windows SSD は手動で認識させる必要があります。
Step 1: os-prober を有効化(重要なハマりポイント)
Ubuntu 26.04 では os-prober がデフォルトで無効になっています。sudo update-grub を実行しても以下の警告で Windows が検出されません:
Warning: os-prober will not be executed to detect other bootable partitions.
Systems on them will not be added to the GRUB boot configuration.
Check GRUB_DISABLE_OS_PROBER documentation entry.GRUB 設定ファイルを編集して os-prober を有効化します:
sudo nano /etc/default/grubファイル末尾に以下を追加(既に GRUB_DISABLE_OS_PROBER 行があれば書き換える):
GRUB_DISABLE_OS_PROBER=false保存後、再度 update-grub:
sudo update-grub成功すると以下のように Windows Boot Manager が検出されます:
Found Windows Boot Manager on /dev/nvme0n1p1/efi/Microsoft/Boot/bootmgfw.efi💡 なぜデフォルト無効なのか:
os-proberは他のドライブもスキャンするため、起動時間が伸びる + シングル OS 環境では不要、という判断で Ubuntu 22.04 以降デフォルト無効化されました。デュアルブート構成では必ず有効化が必要です。
Step 2: GRUB メニューの確認
sudo reboot 後、以下のような GRUB メニューが表示されれば成功:
GNU GRUB version 2.12
*Ubuntu
Advanced options for Ubuntu
Memory test (mt86+x64)
Windows Boot Manager (on /dev/nvme0n1p1)
UEFI Firmware Settings
The highlighted entry will be executed automatically in 10s.10 秒の自動カウントダウンで デフォルト OS(Ubuntu) が起動。Windows を起動したいときは矢印キーで Windows Boot Manager を選んで Enter。
Step 3: BIOS Boot Priority を Ubuntu 優先に
最後に、BIOS で Boot Priority を Ubuntu (KIOXIA EXCERIA PLUS G4 SSD) を 1 番目 に設定します。GIGABYTE の BIOS Easy Mode ならマウスのドラッグ操作で並び替え可能。
| 順位 | エントリ |
|---|---|
| 1st | Ubuntu (KIOXIA-EXCERIA PLUS G4 SSD) |
| 2nd | Windows Boot Manager (CT1000T700SSD5 等) |
これで電源 ON → GRUB → Ubuntu の流れが確立します。
GRUB が表示されない場合
sudo update-grubを再実行。それでも出ない場合は BIOS の Boot Priority が増設 SSD ではなく Windows 側になっている可能性が高いので確認します。
デフォルト OS の切替
普段は Ubuntu 起動 / 一時的に Windows、を快適に切り替えるテクニック:
# 一覧を確認
grep "menuentry " /boot/grub/grub.cfg | nl
# 例: 3 番目(Windows Boot Manager)を「次回起動だけ」デフォルトに
sudo grub-reboot 2
sudo reboot💡
grub-rebootは 次回 1 回だけ有効で、その次の再起動からはまた Ubuntu に戻ります。「一瞬 Windows で e-Tax をやってまた Ubuntu」のような切替に最適。
恒久的に Windows をデフォルトにしたい場合は /etc/default/grub の GRUB_DEFAULT を変更して sudo update-grub。
🎨 KDE Plasma の追加インストール(Kubuntu Desktop)
Ubuntu 26.04 LTS は GNOME 標準でインストールされていますが、KDE Plasma を 後付けで追加できます。Kubuntu の ISO を別途使う必要はありません。
インストールコマンド
sudo apt install kubuntu-desktop -ykubuntu-desktop は Ubuntu 公式のメタパッケージで、KDE Plasma 6 系 + Dolphin(ファイラ)+ Konsole(ターミナル)+ KDE 標準アプリを一括導入します。Ubuntu と Kubuntu のリポジトリは共通なので、後付けでも安定動作します。
💡 Ubuntu 公式 ISO → kubuntu-desktop 後付け が実用的です。理由:
- 先に Ubuntu の安定インストールを終わらせられるので、ハードウェア互換性のトラブルを切り分けやすい(NVIDIA ドライバ対応も Ubuntu 標準フローが最も実績豊富)
- Kubuntu ISO を別途焼く手間が要らない
- 後付けでも KDE のフル機能が利用可能
Wayland / X11 セッションの実機挙動
一般的な解説では「ログイン画面で Plasma (Wayland) または Plasma (X11) が選択できる」とありますが、Ubuntu 26.04 + kubuntu-desktop 構成の実機では Wayland セッションのみが起動するケースが多く、選択肢が出ないことがあります。
| セッション | 実機での提供状況 | 動作 |
|---|---|---|
| Plasma (Wayland) | ✅ デフォルトで起動 | NVIDIA + KDE 6 系で安定。業務利用で快適動作中 |
| Plasma (X11) | ❌ 提供されないケースあり | 必要なら別途 X11 セッションパッケージを追加 |
💡 Wayland で困らないか不安な場合の現実: 実機では Wayland セッションのまま、Chrome / Google Meet / VS Code / Docker GUI クライアント・各種開発ツールすべて問題なく動作しています。Chrome の Google Meet でバーチャル背景を有効化したときだけ映像が真っ白になる Wayland + NVIDIA + Chrome WebGL 特有の症状は別途対処が必要ですが、これは第 4 回(Microsoft 365 → Google Workspace 移行)で Workspace 利用時のハマりどころとしてまとめて扱います。
起動時のセッション選択
ログアウト → ログイン画面で右下に セッションメニューが出る場合は、そこで Plasma / GNOME を切り替えできます。出ない場合は Plasma がデフォルトとして自動選択されます。GNOME を完全に外したいなら:
sudo apt remove --purge ubuntu-desktop gnome-shell
sudo apt autoremove --purgeただし、初期は 両方残しておいて好みに応じて切り替えるのが無難です。
🛡️ リスクと対策(経営層・社内向け説明用)
| リスク | 影響度 | 対策 |
|---|---|---|
| Ubuntu インストール時に Windows 側 SSD を誤指定 | 致命的 | Windows SSD を物理的に取り外してインストール(実機推奨) |
| NVIDIA GPU で初回起動フリーズ | 中 | USB ブートメニューで Ubuntu (safe graphics) を選択 |
| GRUB に Windows が出てこない | 中 | /etc/default/grub で GRUB_DISABLE_OS_PROBER=false を設定 → sudo update-grub |
| Secure Boot との非互換 | 低 | Ubuntu 26.04 LTS は Shim 経由で対応済み |
| デュアルブート間の時刻ずれ | 中 | Windows 側の RealTimeIsUniversal レジストリで UTC 化 |
| BitLocker 回復キー要求 | 中 | BIOS 設定は Ubuntu 増設前に固める。Secure Boot は ON のまま |
| Bluetooth キーボードが BIOS で動かない | 低 | USB 有線キーボード or マウスを別途用意 |
Windows との時刻ずれ対策(実機 NTP 有効環境では基本不要)
💡 CTS 環境のような常時オンライン業務 PC では、デフォルト設定のままで時刻ずれを体感しないのが実態です。インターネット接続が前提の現代の業務環境では、両 OS の NTP 自動同期が瞬時に補正するため、伝統的に語られる「9 時間ずれる」現象は表に出ません。
仕組み(背景知識)
ハードウェア時計(RTC)の解釈が OS で異なります:
| OS | RTC の解釈(デフォルト) |
|---|---|
| Ubuntu / Linux(systemd 系) | UTC として扱う |
| Windows | ローカル時刻として扱う |
例: 日本時間 12:00 のとき、Ubuntu は RTC に 03:00 (UTC) を書きます。Windows に切り替えて起動すると、Windows はその 03:00 をローカル時刻として読むため、画面表示が「03:00」となり 9 時間ずれます(理論上)。
なぜ実機で発生しないか
両 OS とも NTP 自動同期が起動直後に走り、RTC 由来のずれを瞬時に上書きするためです:
| 要因 | Ubuntu 26.04 + Windows 11 のデフォルト |
|---|---|
| Ubuntu | systemd-timesyncd(標準)または chrony(高機能版・Ubuntu Server や派生ディストロで採用される)が NTP クライアントとして常駐 |
| Windows 11 | 「インターネット時刻の同期」デフォルト ON |
| systemd 216 以降 | RTC が local time に設定されている場合、systemd は RTC への書き戻しを行わない(Windows との互換性のため) |
同期状態の確認
Ubuntu 側の総合状態は timedatectl status で確認できます:
timedatectl status期待される出力:
Local time: 日 2026-05-10 13:42:02 JST
Universal time: 日 2026-05-10 04:42:02 UTC
RTC time: 日 2026-05-10 04:42:02
Time zone: Asia/Tokyo (JST, +0900)
System clock synchronized: yes ← NTP 同期済み
NTP service: active ← NTP クライアント常駐
RTC in local TZ: no ← RTC を UTC で管理(Linux デフォルト)System clock synchronized: yes + NTP service: active が両方そろっていれば、Windows との切替で時刻ずれを体感することはありません。
NTP クライアントの種類を判定
systemctl list-units --type=service --state=running | grep -iE "ntp|time|chrony"| 結果に現れるサービス | 種別 |
|---|---|
systemd-timesyncd.service | 標準(軽量、apt install 時のデフォルト) |
chrony.service | 高機能(オフライン補正・複数サーバー stratum 投票・精度が高い) |
⚠️
timedatectl show-timesyncはsystemd-timesyncd専用 —chronyを使っている環境で実行するとCommand requires systemd-timesyncd.service...というエラーになります。chronyの詳細状態はchronyc sources/chronyc trackingで確認します:chronyc sources # 参照している NTP サーバー一覧 chronyc tracking # 同期精度の詳細(オフセット・stratum 等)業務 PC では どちらが動いていても結果は同じ(時刻ずれが体感できないレベルで補正される)。
chronyの方が精度・耐性で上ですが、常時オンラインのデスクトップでは差を意識する場面はあまりありません。
ずれが顕在化する条件(限定的)
| ケース | 影響 |
|---|---|
| オフライン環境(出張先・閉域網・LAN 分離) | NTP 同期できず 9 時間ずれが残る |
| NTP 同期を意図的に切っている | 同上 |
| Firewall で NTP(123/UDP)が遮断されている | 同上 |
| タイムスタンプ厳密性が必須な業務(電子署名・監査ログ・タイムクリティカルな通信) | 起動直後の数秒のずれが許容できない |
これらに該当しない一般的な業務 PC では 追加対処は不要です。
それでも対処したい場合(最後の手段)
レジストリで Windows を UTC 管理に揃える方法は Microsoft 公式に正式サポートされていないため、推奨はしません:
Set-ItemProperty -Path "HKLM:\SYSTEM\CurrentControlSet\Control\TimeZoneInformation" `
-Name RealTimeIsUniversal -Value 1 -Type DWord⚠️
RealTimeIsUniversal設定の注意点
- Microsoft 公式の サポート文書で「設定すると Windows の時刻変更ができなくなる」等の副作用が言及されている
- 一部のサードパーティアプリが「RTC = ローカル時刻」前提で動作するため不整合が起きる可能性
- Windows Update / 機能更新で設定が破壊される報告あり
対称解として
timedatectl set-local-rtc 1で Linux を local time 管理に変える方法もありますが、こちらも systemd 公式が「DST やタイムゾーン変更で問題が起きる」 と非推奨を明記しています。
結論: 両 OS で NTP 同期を有効化するのが現代の正解。レジストリ・set-local-rtc はオフライン環境で同期できない場合の最後の手段としてのみ検討してください。
✅ 第 2 回まとめ
- 物理分離デュアルブート(M.2 SSD 2 枚構成) が業務 PC では最も安全。SSD を抜けば元通りという撤退路を持てる
- インストール時は Windows SSD を物理的に取り外すのが究極の安全策。ネジ 1 本の手間で Windows 破壊リスクをゼロに
- NVIDIA GPU 搭載機は
Ubuntu (safe graphics)で起動。Try or Install Ubuntuでフリーズする現象はほぼ確実に発生する GRUB_DISABLE_OS_PROBER=falseを設定しないと Windows が GRUB に出てこない(Ubuntu 22.04 以降のデフォルト変更)- Ubuntu 26.04 LTS + KDE Plasma(
kubuntu-desktop後付け)は 2031 年までサポートされ、Windows ユーザーが違和感なく使える操作感 - Wayland セッションだけが提供されるケースが多いが、業務利用では Wayland のみで快適に動作中
- BIOS は UEFI / Secure Boot ON のまま。Bluetooth キーボードは BIOS で動かないので USB 有線を準備
- GRUB は
grub-rebootで「次回だけ Windows」が便利。Windows 側のレジストリで時刻ずれも解決
これで OS の土台は完成です。ただし、業務 PC として日常運用するには、NVIDIA ドライバの事後導入、サスペンドの完全無効化(NVIDIA カーネルパニック対策)、Bluetooth キーボードの取り回し、標準ターミナル Ptyxis の使い勝手など、「OS は起動するけど業務に使えない」谷を埋める必要があります。次回はそこを扱います。
次回「Ubuntu PC セットアップ — NVIDIA・サスペンド・周辺機器」では、ubuntu-drivers devices での NVIDIA ドライバ選定(580 LTS 推奨の根拠)、systemctl mask sleep.target 等によるサスペンド完全無効化、HHKB Hybrid の Bluetooth ペアリング不安定問題の回避、Ptyxis → Terminator/Konsole の選定指針、Kraken Elite の LED 制御制約、5GbE 有線速度の実測値までを実機ベースで解説します。
📚 シリーズ記事
| # | タイトル | 内容 |
|---|---|---|
| 1 | 脱Microsoft 全体戦略・総論 | 値上げ背景・ロードマップ・コスト・リスク |
| 2 | Windows 11 + Ubuntu デュアルブート構築(本記事) | M.2 物理分離・KDE Plasma・GRUB |
| 3 | Ubuntu PC セットアップ | NVIDIA ドライバ事後導入・サスペンド無効化・Bluetooth・ターミナル選定 |
| 4 | Ubuntu 開発環境セットアップ | Docker Engine ネイティブ・DevContainer 機密情報マウント・Claude Code |
| 5 | Ubuntu データ共有セットアップ | rclone Drive + systemd・QNAP NFS/SMB・Obsidian Vault・AppArmor |
| 6 | Microsoft 365 → Google Workspace 全面移行 | メール・SSO・MFA・MX 切替 + OneDrive → Google Drive ファイル移行・共有リンク・コスト最適化 |
| 7 | Ubuntu リモート開発セットアップ | Tailscale + SSH + VS Code Remote / DevContainer・Wayland ホスト |
| 8 | ActiveReports → Playwright + Scriban 移行(公開予定) | 帳票エンジン置換・バーコード・印刷品質 PDF |
| 9 | コスト削減効果と 1 年運用レビュー(公開予定) | 実績ベースのコスト・運用上のハマりどころ |
🔗 関連リソース
CTS-KB 内の関連記事
- 脱Microsoft 全体戦略・総論 — シリーズ第 1 回(前提となるロードマップ)
- Claude Code 7 層ハーネスエンジニアリング — 第 3 回で構築する Claude Code 環境の設計指針
外部リソース
- Ubuntu 公式ダウンロード
- Kubuntu 公式 — KDE Plasma 標準の Ubuntu 派生
- Rufus — Windows 用の USB ブートメディア作成ツール
- balenaEtcher — クロスプラットフォームの USB 書き込みツール
- Ubuntu Secure Boot 公式 Wiki — Shim 対応の仕組み